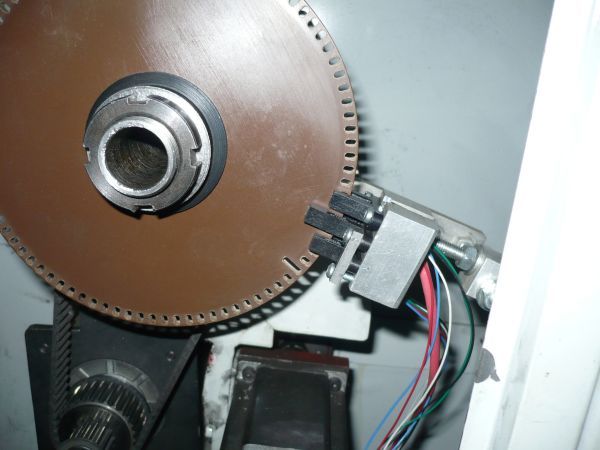
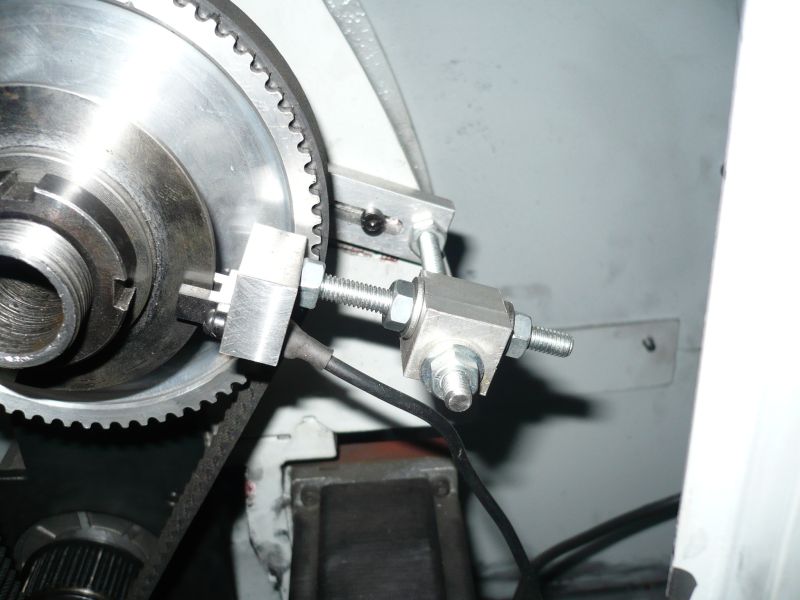
Encoder – How to build one?
Encoder – How to build one?
- This topic has 12 replies, 7 voices, and was last updated 5 November 2012 at 21:08 by
 Sub Mandrel.
Sub Mandrel.




- Please log in to reply to this topic. Registering is free and easy using the links on the menu at the top of this page.
Latest Replies
-
- Topic
- Voices
- Last Post
-
-
road registration and traction trailer.
Started by:
RRMBK
in: Traction engines
- 7
-
6 July 2025 at 22:41
here again
-
Bridgeport ways and wear
Started by:
inline
in: Manual machine tools
- 5
-
6 July 2025 at 22:14
inline
-
Motorised Adept No. 2 Shaper
Started by:
William Ayerst
in: Workshop Tools and Tooling
- 9
-
6 July 2025 at 22:14
William Ayerst
-
Starrett and other tool manufacturer wood boxes
Started by:
Ian Owen NZ
in: Workshop Tools and Tooling
- 12
-
6 July 2025 at 21:43
Mark Easingwood
-
What Did You Do Today 2025
1
2
…
7
8
Started by:
JasonB
in: The Tea Room
- 33
-
6 July 2025 at 21:35
Nigel Graham 2
-
Speed camera
1
2
3
Started by:
David George 1
in: The Tea Room
- 24
-
6 July 2025 at 21:05
old mart
-
Pragotron Slave Clock
Started by:
renardiere7
in: Clocks and Scientific Instruments
- 6
-
6 July 2025 at 21:04
Robert Atkinson 2
-
Twin Engineering’s heavy mill/drill quill removal
1
2
Started by:
Martin of Wick
in: Manual machine tools
- 11
-
6 July 2025 at 20:30
old mart
-
Herbert B drill – a question and a curiosity…
Started by:
gerry madden
in: Manual machine tools
- 2
-
6 July 2025 at 20:22
bernard towers
-
New member
Started by:
nige1
in: Introduce Yourself – New members start here!
- 4
-
6 July 2025 at 19:01
John Hinkley
-
M type top slide conversion??
Started by:
jimmyjaffa
in: Beginners questions
- 7
-
6 July 2025 at 14:20
David George 1
-
Boiler Design – issue 4765
1
2
…
7
8
Started by:
Charles Lamont
in: Model Engineer & Workshop
- 26
-
6 July 2025 at 13:05
lezsmith
-
Colchester Chipmaster Clutch question
Started by:
Peter_H
in: Manual machine tools
- 4
-
6 July 2025 at 10:47
Peter_H
-
Sanjay’s Banjo Engine
Started by:
JasonB
in: Stationary engines
- 3
-
6 July 2025 at 09:58
JasonB
-
In memoriam: Peter Neal
Started by:
jamesn
in: The Tea Room
- 1
-
6 July 2025 at 09:53
jamesn
-
Wickseed power hacksaw 8” information
Started by:
simonkeeligan@me.com
in: Beginners questions
- 2
-
6 July 2025 at 07:44
Nicholas Farr
-
Bentley BR2 Rotary Aero Engine
Started by:
notlobgp14
in: Miscellaneous models
- 4
-
5 July 2025 at 22:46
notlobgp14
-
Starrett micrometer.
Started by:
Graeme Seed
in: Workshop Tools and Tooling
- 7
-
5 July 2025 at 21:30
peak4
-
Dial test indicator vs Dial indicator
Started by:
martian
in: Workshop Tools and Tooling
- 17
-
5 July 2025 at 20:19
martian
-
Any ideas how to repair this?
Started by:
Ian Parkin
in: Related Hobbies including Vehicle Restoration
- 11
-
5 July 2025 at 15:36
Pete Rimmer
-
Chucking Money Away!
Started by:
Chris Crew
in: The Tea Room
- 6
-
5 July 2025 at 12:55
Chris Crew
-
2 Machine lights
Started by:
modeng2000
in: Workshop Tools and Tooling
- 2
-
5 July 2025 at 11:58
Dalboy
-
Boxford lathe & vertical mill VFD conversion help with start stop
Started by:
Andrew Schofield
in: Beginners questions
- 8
-
5 July 2025 at 11:39
Clive Brown 1
-
1965 Colchester Chipmaster
Started by:
andyplant
in: Introduce Yourself – New members start here!
- 6
-
5 July 2025 at 11:09
Rod Renshaw
-
Amadeal AMABL210E Review – Any Requests?
1
2
Started by:
JasonB
in: Model Engineer & Workshop
- 16
-
5 July 2025 at 05:49
Diogenes
-
road registration and traction trailer.
Latest Issue

Newsletter Sign-up
Latest Replies
- road registration and traction trailer.
- Bridgeport ways and wear
- Motorised Adept No. 2 Shaper
- Starrett and other tool manufacturer wood boxes
- What Did You Do Today 2025
- Speed camera
- Pragotron Slave Clock
- Twin Engineering’s heavy mill/drill quill removal
- Herbert B drill – a question and a curiosity…
- New member

