DIY Pendulum Timer – GPS-Synced Beat Analyser
DIY Pendulum Timer – GPS-Synced Beat Analyser
- This topic has 11 replies, 5 voices, and was last updated 2 April 2025 at 16:46 by
 Michael Gilligan.
Michael Gilligan.

- Please log in to reply to this topic. Registering is free and easy using the links on the menu at the top of this page.
Latest Replies
-
- Topic
- Voices
- Last Post
-
-
Stripped aluminum threads. Now what?
Started by:
 brucemc777
in: Beginners questions
brucemc777
in: Beginners questions
- 11
-
2 April 2025 at 17:05
brucemc777
-
A drum type cutting frame has another use
Started by:
vic newey
in: Workshop Tools and Tooling
- 2
-
2 April 2025 at 16:56
Diogenes
-
Tool holder supplier
Started by:
nevillet
in: Workshop Tools and Tooling
- 6
-
2 April 2025 at 16:51
JasonB
-
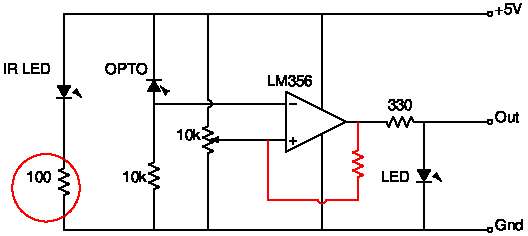
DIY Pendulum Timer – GPS-Synced Beat Analyser
Started by:
Chris Raynerd 2
in: Clocks and Scientific Instruments
- 5
-
2 April 2025 at 16:46
Michael Gilligan
-
Half Scale 1/4HP A J Weed Engine
Started by:
JasonB
in: Stationary engines
- 4
-
2 April 2025 at 16:44
JasonB
-
Generator size for vfd controlled 3 phase 5.5 kw motor
Started by:
PutneyChap
in: Electronics in the Workshop
- 10
-
2 April 2025 at 15:14
Stuart Smith 5
-
New member old lathe
Started by:
t1krt
in: Introduce Yourself – New members start here!
- 5
-
2 April 2025 at 14:48
t1krt
-
Su251-53
Started by:
parovoz
in: Locomotives
- 10
-
2 April 2025 at 13:53
mike robinson 2
-
Sulphuric Acid.
Started by:
Andrew Tinsley
in: General Questions
- 13
-
2 April 2025 at 13:39
Neil Wyatt
-
Which lathes have drawbars in the headstock?
Started by:
ell81
in: Beginners questions
- 16
-
2 April 2025 at 13:18
Bazyle
-
How to stop Loctite sticking where it isn’t wanted?
Started by:
roger61
in: Workshop Techniques
- 3
-
2 April 2025 at 13:01
Brian Baker 2
-
Powered hacksaw – blade lift for the return stroke
Started by:
Sonic Escape
in: General Questions
- 7
-
2 April 2025 at 12:15
Clive Foster
-
2 nice tools from temu
Started by:
Ian Parkin
in: Workshop Tools and Tooling
- 6
-
2 April 2025 at 09:46
Tony Pratt 1
-
Hello from Kent
Started by:
michaeljf93
in: Introduce Yourself – New members start here!
- 8
-
2 April 2025 at 09:00
Taf_Pembs
-
Marlco knurler wheels
Started by:
Pete.
in: General Questions
- 6
-
2 April 2025 at 08:43
Clive Foster
-
Tangential tooling
Started by:
Keith Matheson
in: Workshop Tools and Tooling
- 10
-
2 April 2025 at 01:29
Pete.
-
Forum Software?
Started by:
Vic
in: The Tea Room
- 2
-
2 April 2025 at 00:11
Vic
-
Special BA bolts from Chronos
Started by:
old mart
in: Materials
- 3
-
1 April 2025 at 17:52
Greensands
-
Removing an advert (Myford SOLD)
Started by:
Tony Martyr
in: General Questions
- 2
-
1 April 2025 at 17:45
bernard towers
-
Bassett Lowke “Eclipse”
Started by:
JasonB
in: Stationary engines
- 6
-
1 April 2025 at 13:32
Jim Nic
-
Blue crystals. Probably not meth?
Started by:
pjbiker
in: Beginners questions
- 8
-
1 April 2025 at 11:46
Juddy
-
Unimat 3 / SL “T” nuts – off the shelf type
Started by:
rjenkinsgb
in: Manual machine tools
- 1
-
1 April 2025 at 10:25
rjenkinsgb
-
Beginner with newly bought lathe – many questions
Started by:
ell81
in: Beginners questions
- 14
-
31 March 2025 at 23:31
old fool
-
Clarke CL500M longitudinal feed screw
1
2
Started by:
Stuart Cox 3
in: General Questions
- 13
-
31 March 2025 at 20:42
john halfpenny
-
More Lidl questions
1
2
3
Started by:
old mart
in: Hints And Tips for model engineers
- 25
-
31 March 2025 at 19:45
Robert Atkinson 2
-
Stripped aluminum threads. Now what?
Latest Issue

Newsletter Sign-up
Latest Replies
- Stripped aluminum threads. Now what?
- A drum type cutting frame has another use
- Tool holder supplier
- DIY Pendulum Timer – GPS-Synced Beat Analyser
- Half Scale 1/4HP A J Weed Engine
- Generator size for vfd controlled 3 phase 5.5 kw motor
- New member old lathe
- Su251-53
- Sulphuric Acid.
- Which lathes have drawbars in the headstock?

