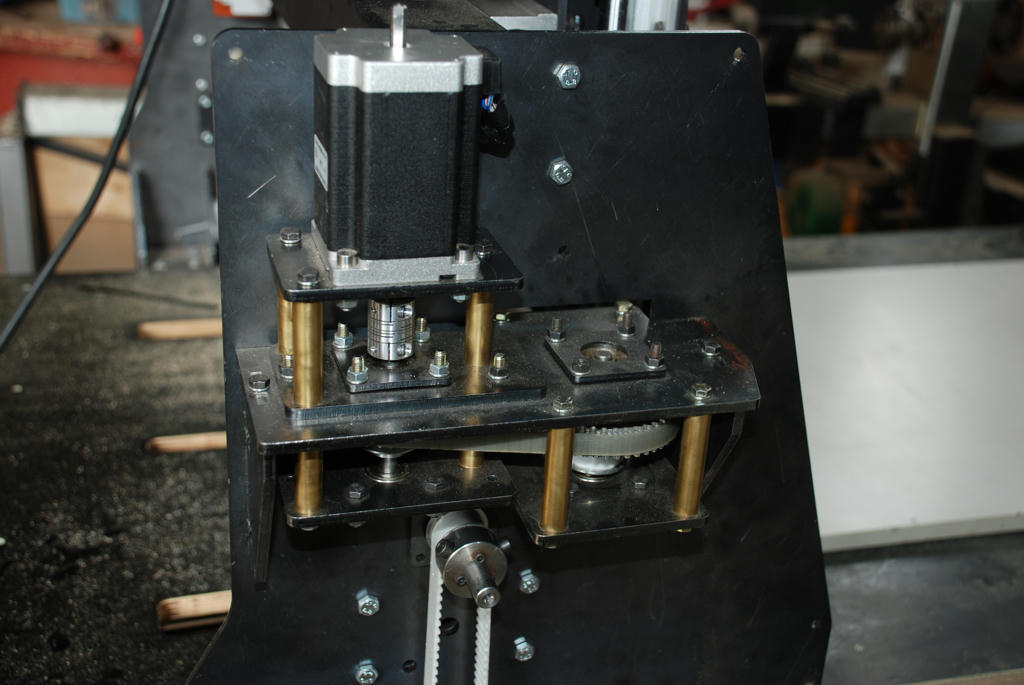
Mill knee driving with a stepper
Mill knee driving with a stepper
- This topic has 55 replies, 11 voices, and was last updated 9 September 2014 at 17:35 by
 jason udall.
jason udall.
- Please log in to reply to this topic. Registering is free and easy using the links on the menu at the top of this page.
Latest Replies
-
- Topic
- Voices
- Last Post
-
-
Sanjay’s Banjo Engine
Started by:
JasonB
in: Stationary engines
- 3
-
5 July 2025 at 19:14
JasonB
-
Speed camera
1
2
3
Started by:
David George 1
in: The Tea Room
- 23
-
5 July 2025 at 18:44
Another JohnS
-
Bentley BR2 Rotary Aero Engine
Started by:
notlobgp14
in: Miscellaneous models
- 4
-
5 July 2025 at 15:39
JasonB
-
Any ideas how to repair this?
Started by:
Ian Parkin
in: Related Hobbies including Vehicle Restoration
- 11
-
5 July 2025 at 15:36
Pete Rimmer
-
Chucking Money Away!
Started by:
Chris Crew
in: The Tea Room
- 6
-
5 July 2025 at 12:55
Chris Crew
-
2 Machine lights
Started by:
modeng2000
in: Workshop Tools and Tooling
- 2
-
5 July 2025 at 11:58
Dalboy
-
Boxford lathe & vertical mill VFD conversion help with start stop
Started by:
Andrew Schofield
in: Beginners questions
- 8
-
5 July 2025 at 11:39
Clive Brown 1
-
1965 Colchester Chipmaster
Started by:
andyplant
in: Introduce Yourself – New members start here!
- 6
-
5 July 2025 at 11:09
Rod Renshaw
-
Starrett micrometer.
Started by:
Graeme Seed
in: Workshop Tools and Tooling
- 7
-
5 July 2025 at 10:09
Ian Owen NZ
-
What Did You Do Today 2025
1
2
…
6
7
Started by:
JasonB
in: The Tea Room
- 33
-
5 July 2025 at 09:26
Nick Wheeler
-
Twin Engineering’s heavy mill/drill quill removal
Started by:
Martin of Wick
in: Manual machine tools
- 11
-
5 July 2025 at 09:18
Neil Lickfold
-
New member
Started by:
nige1
in: Introduce Yourself – New members start here!
- 3
-
5 July 2025 at 09:10
noel shelley
-
Amadeal AMABL210E Review – Any Requests?
1
2
Started by:
JasonB
in: Model Engineer & Workshop
- 16
-
5 July 2025 at 05:49
Diogenes
-
ML10 backgear
Started by:
alexander1
in: Manual machine tools
- 3
-
5 July 2025 at 00:11
Bazyle
-
The Perpetual Demise of the Model engineer
Started by:
Luker
in: Model engineering club news
- 13
-
4 July 2025 at 17:06
JasonB
-
Colchester Chipmaster Clutch question
Started by:
Peter_H
in: Manual machine tools
- 3
-
4 July 2025 at 16:44
notlobgp14
-
Advice moving 3x machines
Started by:
choochoo_baloo
in: Workshop Techniques
- 5
-
4 July 2025 at 15:46
Bazyle
-
Black plastic to replicate Bakelite
Started by:
Craig Brown
in: Materials
- 8
-
4 July 2025 at 15:35
nj111
-
Firth Valve Gear
Started by:
Andy Stopford
in: Traction engines
- 10
-
4 July 2025 at 14:42
duncan webster 1
-
A Persistent Scam
Started by:
Chris Crew
in: The Tea Room
- 5
-
4 July 2025 at 14:23
Speedy Builder5
-
Hemmingway rotary broaching kit
Started by:
YouraT
in: Workshop Tools and Tooling
- 4
-
4 July 2025 at 09:02
jimmy b
-
Collet closer identification.
Started by:
vic newey
in: Workshop Tools and Tooling
- 10
-
3 July 2025 at 22:36
richlb
-
A grasshopper of unknown vintage
Started by:
mikemunson
in: Stationary engines
- 3
-
3 July 2025 at 20:21
Charles Lamont
-
New (but well aged) member
Started by:
mikemunson
in: Introduce Yourself – New members start here!
- 4
-
3 July 2025 at 19:55
noel shelley
-
New member from Lancashire
Started by:
mannyroad
in: Introduce Yourself – New members start here!
- 7
-
3 July 2025 at 19:14
notlobgp14
-
Sanjay’s Banjo Engine



{kind=link}